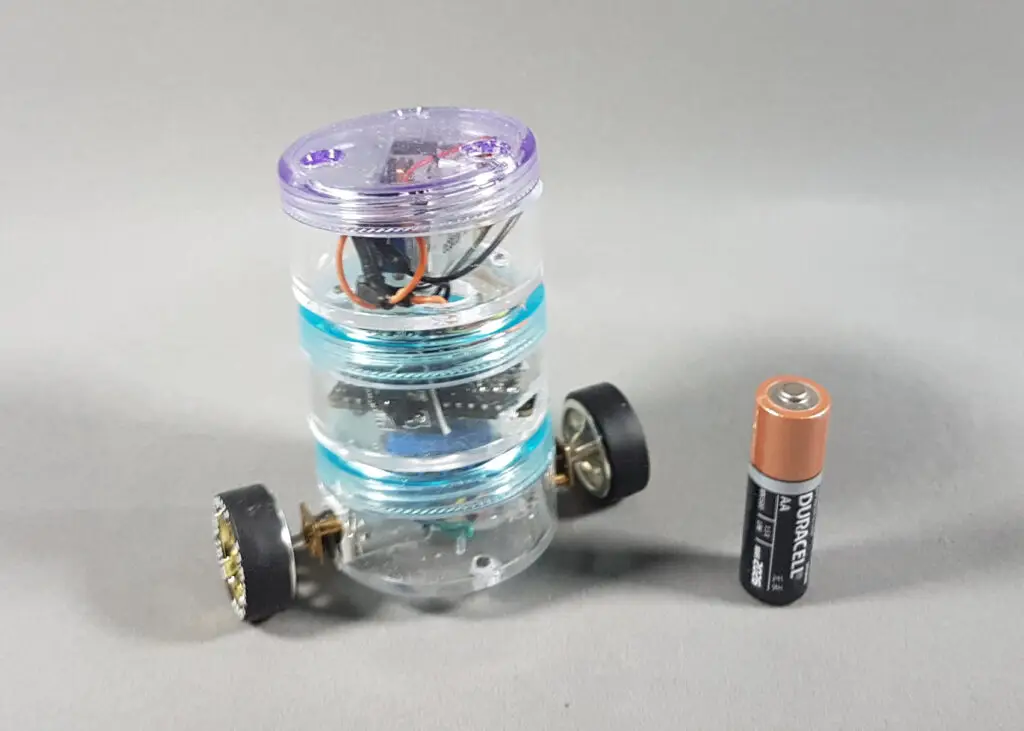
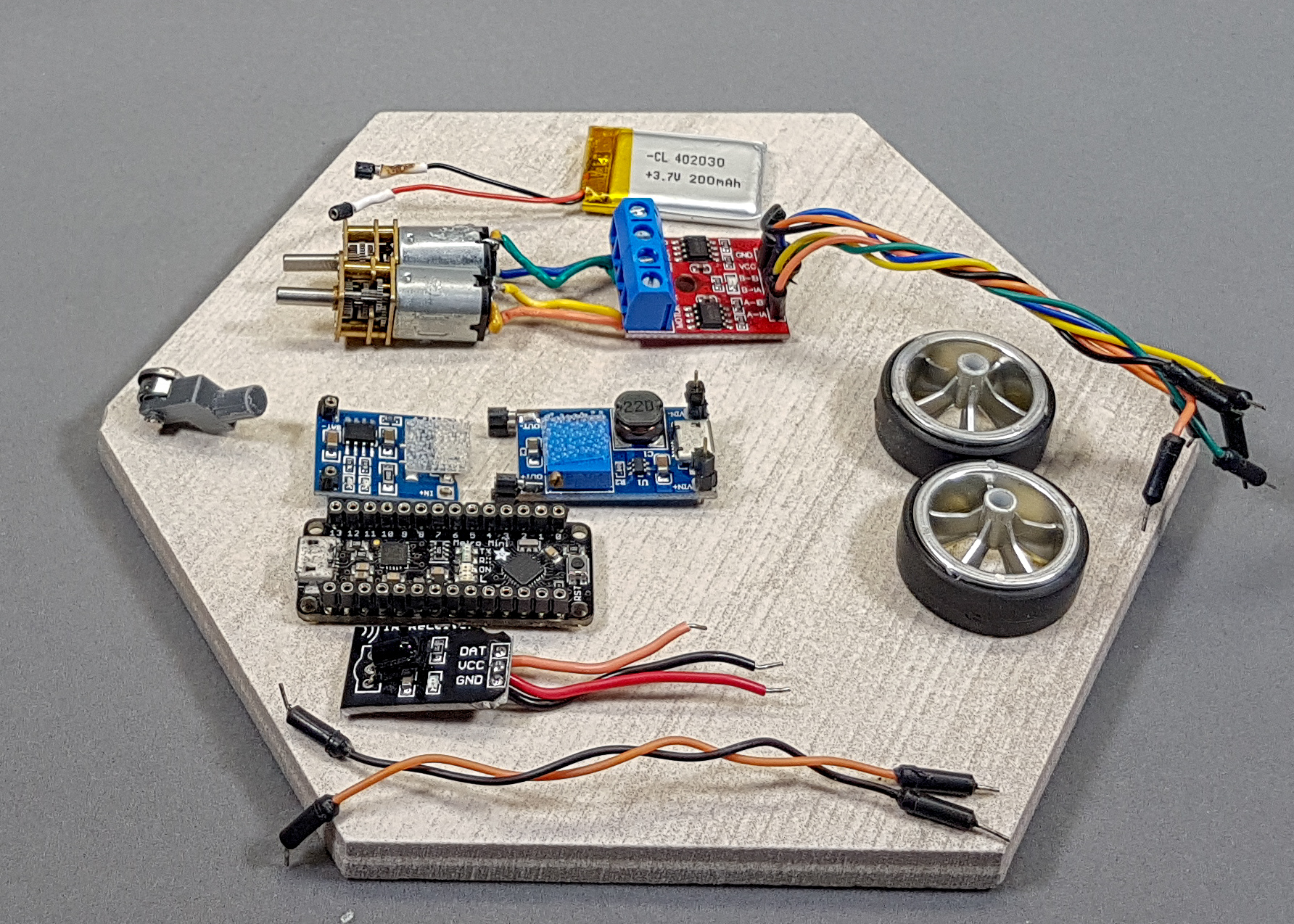
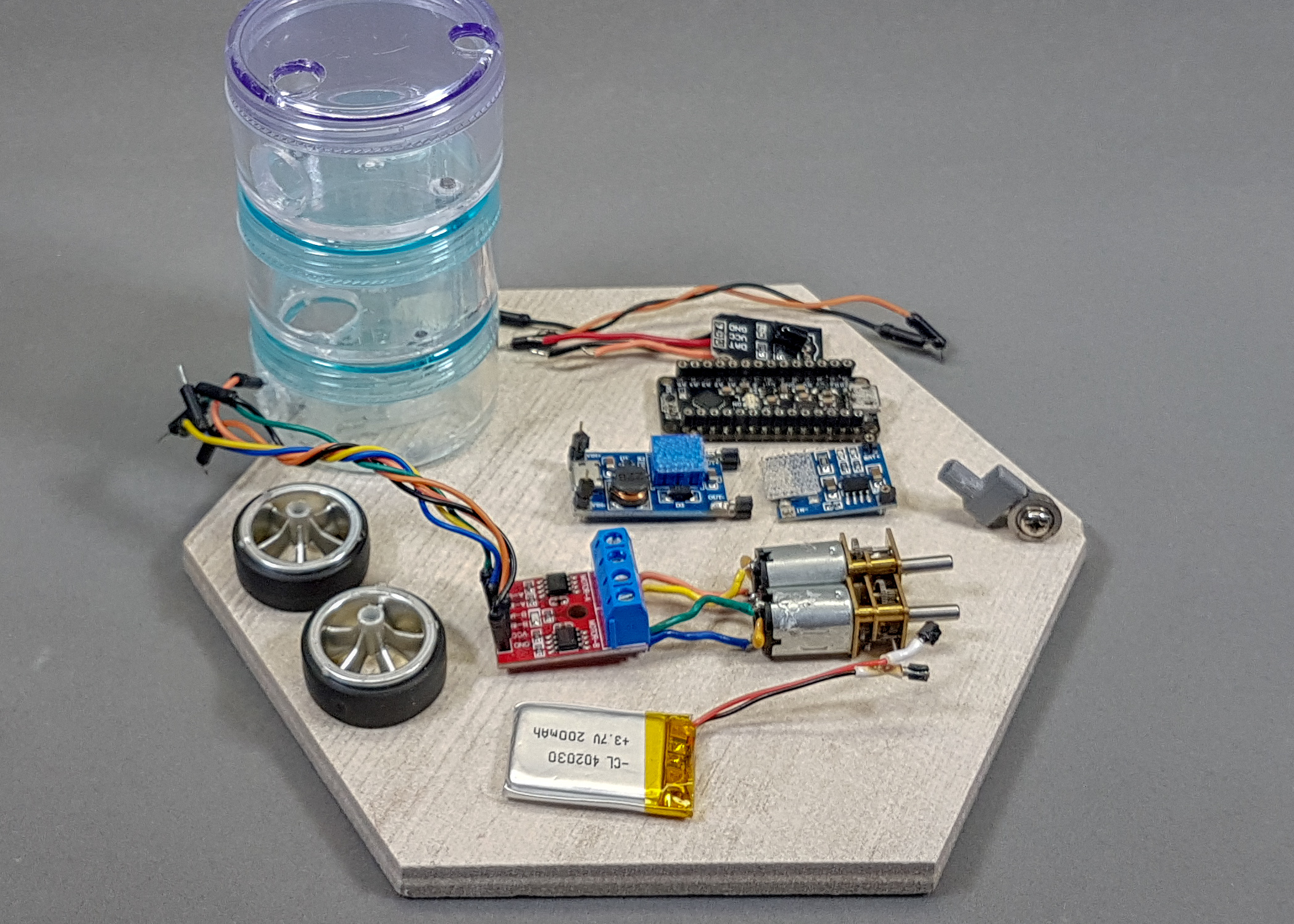
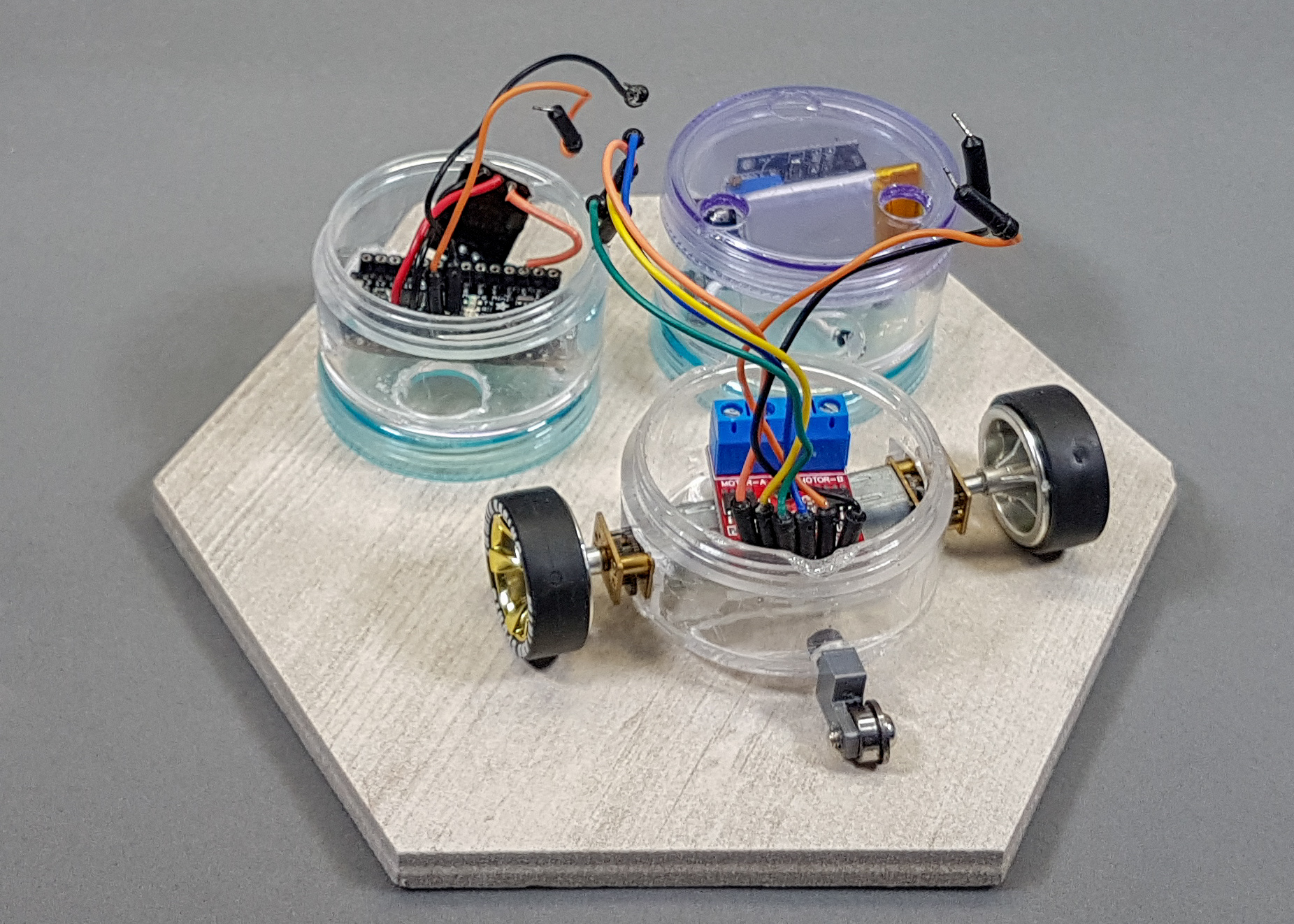
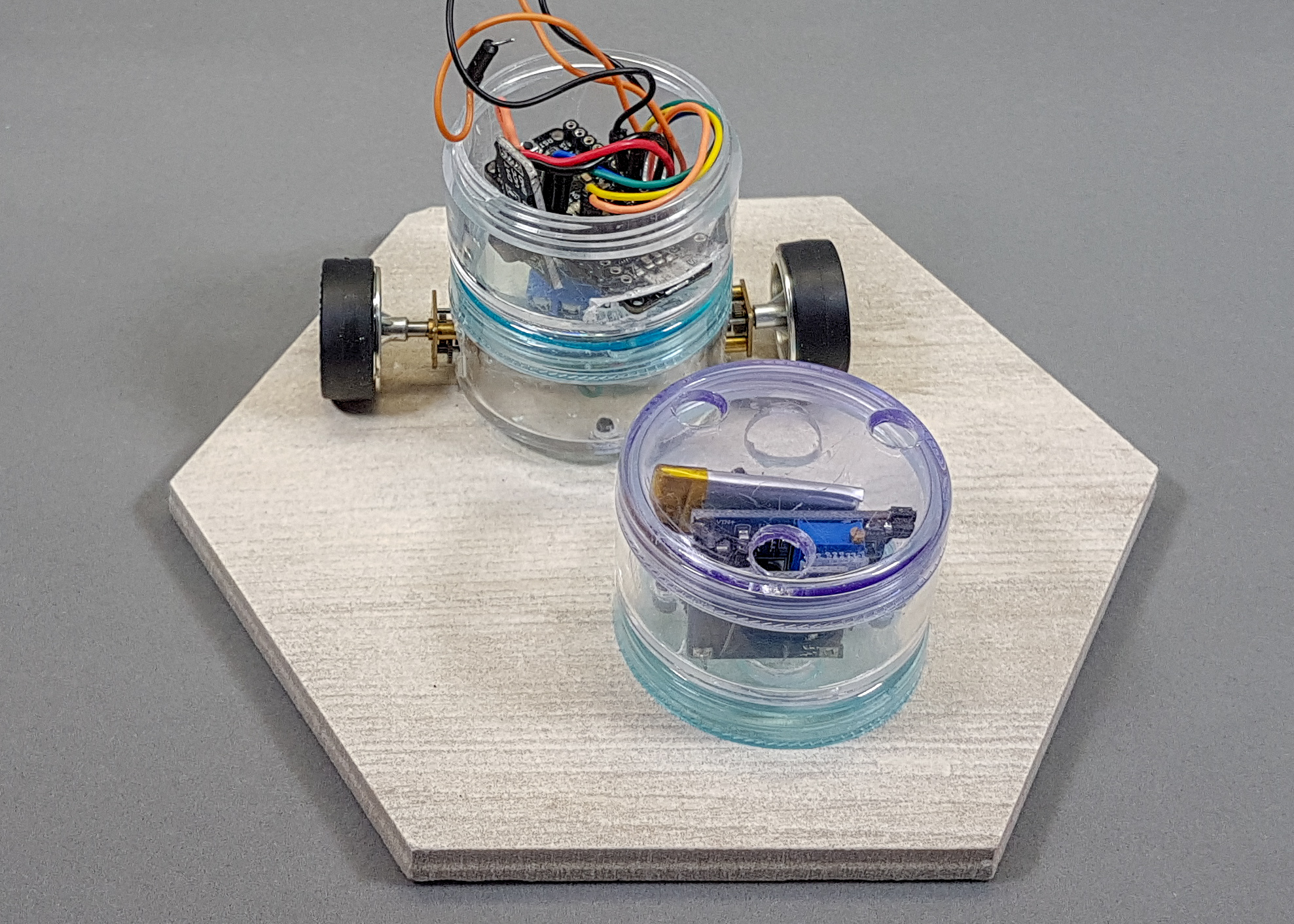
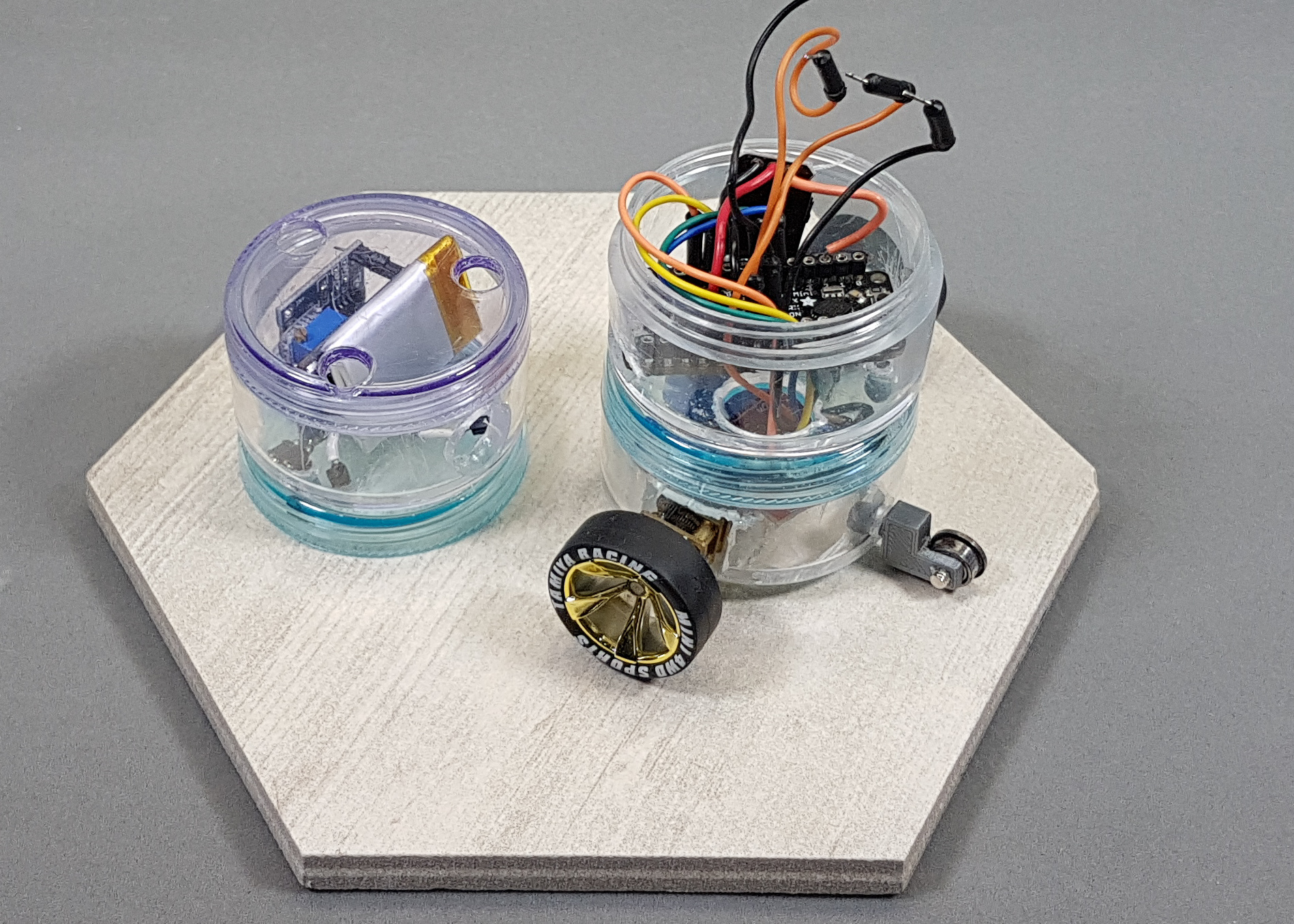
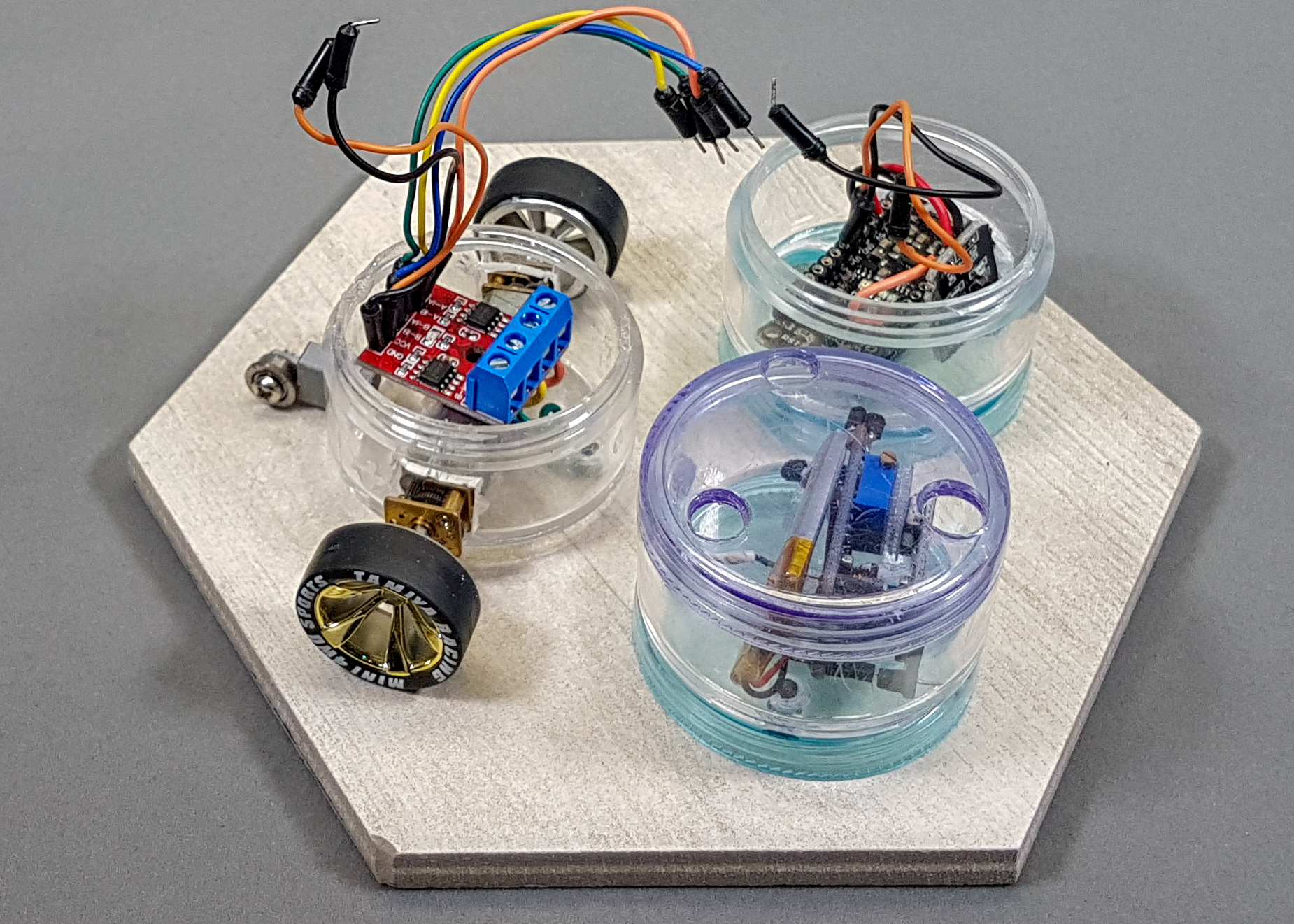
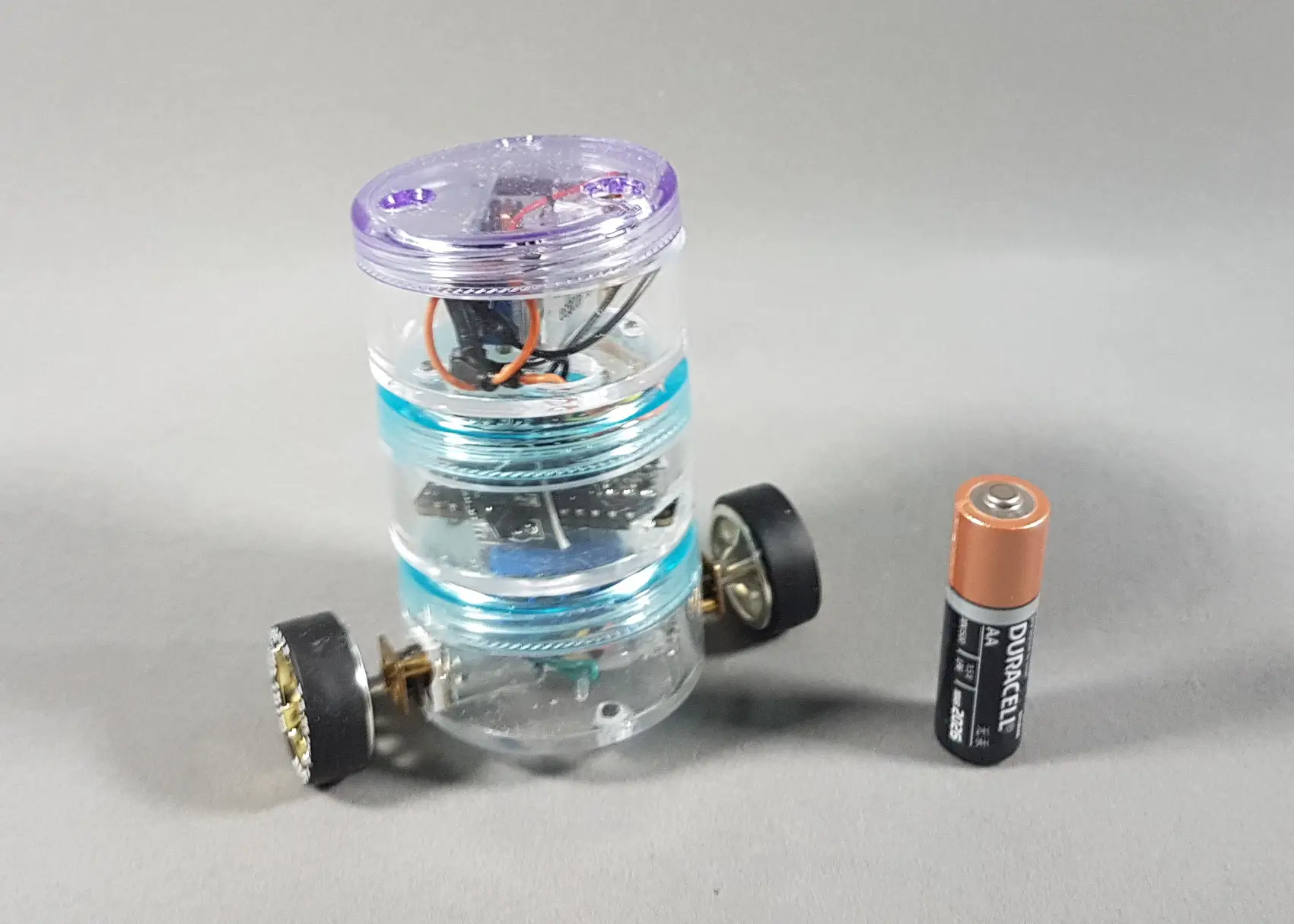
I built this robot as a conceptual prototype that illustrates a robot made of stackable robotics modules. Ideally the modules will connect by simply placing them on top of each other (Imagine OREOS). Each compartment or “Cookie” would contain various robotics components connected via I2C. Examples of modules will be IR sensors, servos, ultrasonic, batteries etc. Using an WIFI enabled controller users will be able to configure the robot’s modules by a smartphone app. Currently this robot uses 2 small geared motors, a 9110 dual motor controller and IR receiver. All of which is connected to a metro mini. It’s powered by a Li-on battery connected to a boost converter for 5volts. The housing is made of small lotion/make-up containers. The wheels and tires are from a Tamiya mini 4×4.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}